
South Korea’s Ingenious Lunar Rover: Wheels That Morph to Conquer the Moon’s Hidden Depths
In the race to unlock the moon’s secrets, South Korea is emerging as a formidable player with a groundbreaking robotic innovation designed to probe the satellite’s most treacherous terrains. Scientists from the Korea Advanced Institute of Science and Technology (KAIST) have unveiled a compact rover equipped with transformative wheels that expand and contract, mimicking the fluidity of kinetic sculptures. This development, detailed in a recent study, promises to navigate the moon’s rugged caves—potential havens for future human settlements shielded from cosmic radiation and extreme temperature swings. As nations like the U.S. and China ramp up lunar ambitions, this South Korean prototype could redefine how we explore extraterrestrial environments.
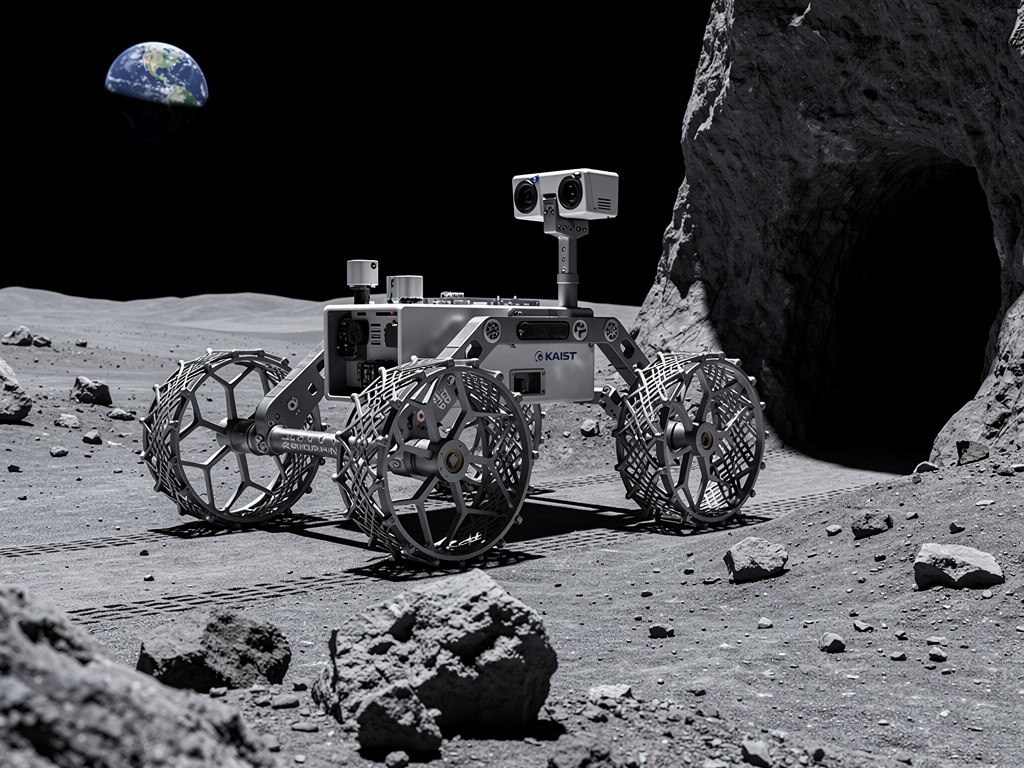
The rover’s standout feature is its airless wheels, crafted from interwoven carbon steel strips that allow for dynamic shape-shifting. In their compact form, these wheels enable the robot to squeeze through narrow passages, while expanding to traverse uneven ground or absorb shocks from drops. Researchers tested the prototype rigorously on Earth, deploying it in actual caves, subjecting it to fire blasts, extreme cold, and aerial drops via drones. According to the team’s findings, this design outperforms traditional hinged or origami-inspired mechanisms, which often falter under lunar hazards like dust and thermal extremes.
This innovation arrives at a pivotal moment for South Korea’s space program. The country, which launched its first lunar orbiter, Danuri, in 2022 via a SpaceX Falcon 9 rocket, is building momentum toward more ambitious goals. Danuri has already provided stunning imagery of the moon’s shadowed regions, as highlighted in a Nature report from late 2023, labeling the mission a success. Now, with this rover prototype, KAIST aims to complement such orbital efforts by enabling ground-level reconnaissance in areas inaccessible to larger vehicles.
Engineering Marvels Behind the Morphing Wheels
The wheels’ construction draws from advanced materials science, using lightweight yet elastic carbon steel to ensure durability without added weight—a critical factor for space missions where every gram counts. “The wheel could absorb impacts and navigate uneven terrain while remaining robust under extreme lunar conditions,” the KAIST paper notes, emphasizing its resilience. Unlike conventional rover wheels, which rely on rigid structures or inflatable elements prone to punctures in vacuum environments, this design eliminates air entirely, reducing failure points.
Industry insiders point out that this technology could integrate with larger mission architectures. For instance, the team envisions a mothership rover deploying multiple smaller units equipped with these wheels to scout cave interiors. This modular approach echoes strategies in NASA’s Artemis program, where robotic precursors pave the way for human explorers. Recent posts on X from space enthusiasts, including discussions on lunar robotic advancements, underscore growing excitement around such flexible mobility solutions, with users highlighting their potential for in-situ resource utilization in harsh settings.
Comparisons to other lunar rovers reveal the Korean design’s edge. NASA’s Perseverance rover on Mars uses rigid aluminum wheels, effective but limited in adaptability. In contrast, the KAIST prototype’s ability to contract for tight spaces and expand for stability addresses a key challenge: exploring lava tubes and pits that could serve as natural shelters. A Futurism article published on December 22, 2025, describes how the rover’s wheels “expand and contract like kinetic art,” drawing parallels to artistic mechanisms for practical space applications.
Broader Implications for Global Space Exploration
South Korea’s push into lunar robotics aligns with its national strategy to achieve independent space capabilities. Just last year, the country marked a milestone with the successful launch of its Nuri rocket, as reported in a January 2025 KeepTrack piece commemorating the anniversary. This self-reliance extends to robotic missions, with plans for a lunar lander by the early 2030s, potentially incorporating these innovative wheels.
International collaborations amplify the significance. South Korea has joined the NASA-led Artemis Accords, positioning it to contribute hardware like this rover to joint endeavors. A 2023 Spaceflight Now update on Danuri noted its role as a pathfinder, carrying instruments like ShadowCam for mapping dark lunar areas—data that could guide rover deployments into caves. The KAIST team’s work builds on this, offering a tool to investigate these sites up close, where resources like water ice might lurk.
Challenges remain, however. Lunar regolith, the fine dust covering the surface, poses a notorious threat to mechanical systems, as seen in past missions where it clogged joints and abraded parts. The Korean wheels’ woven structure aims to mitigate this by flexing rather than grinding, but long-term testing in simulated lunar vacuums will be essential. Recent X posts from robotics experts discuss similar designs, with one noting a Japanese startup’s $15 million funding for lunar rovers in 2023, reflecting a competitive field where adaptability is key.
Testing Regimens and Earth-Based Simulations
To validate the rover’s prowess, KAIST researchers conducted exhaustive trials. They navigated Earth caves to mimic lunar pits, demonstrating the wheels’ ability to climb obstacles and recover from falls. Exposure to fire and subzero temperatures simulated the moon’s thermal extremes, where dayside heat can exceed 120°C and nights plunge to -130°C. These tests, as outlined in a DNyuz report from December 22, 2025, confirm the design’s robustness, with the rover emerging unscathed from drone-dropped impacts.
Such simulations are standard in space engineering, drawing from decades of experience. For comparison, Russia’s 2019 proposal to repurpose a humanoid robot with wheels for lunar missions, covered in an Ars Technica article, highlights alternative mobility concepts. Yet, the Korean approach stands out for its simplicity and elegance, avoiding complex leg mechanisms in favor of wheel-based versatility.
Beyond caves, this technology could enable broader lunar operations, such as mining regolith for oxygen or building materials. X discussions on private lunar mining innovations emphasize how robust wheels might facilitate in-situ resource utilization, reducing the need for Earth-supplied payloads and lowering mission costs.
Strategic Alliances and Future Missions
South Korea’s space agency, KARI, is eyeing integration of this rover into upcoming missions, potentially alongside China’s Chang’e-8, where Hong Kong’s HKUST is developing a similar lunar robot, as announced in a December 18, 2025, The Standard piece. This cross-border synergy underscores Asia’s rising prominence in space, with South Korea positioning itself as a hub for innovative hardware.
Funding and policy support are accelerating progress. The government’s $459 million budget request for a robotic lander, mentioned in a 2022 X post by a space analyst, signals long-term commitment. Recent setbacks, like the failed orbital launch attempt by startup Innospace on December 22, 2025, as detailed in a Space.com update, highlight the hurdles, yet they also fuel determination.
For industry insiders, the economic ripple effects are profound. Companies specializing in advanced materials could license the wheel technology, extending applications to terrestrial robotics in mining or disaster response. A 2025 X post from a materials scientist praised the design’s potential for “endurance under extreme loads,” aligning with trends in resilient engineering.
Pushing Boundaries in Lunar Innovation
As the prototype evolves, KAIST plans vacuum chamber tests to replicate lunar conditions more accurately. Collaborations with NASA could provide access to facilities like those used for Mars rover development, enhancing the design’s maturity. The wheels’ elasticity, derived from carbon steel’s properties, offers a blueprint for future rovers, potentially influencing designs for Mars or asteroid missions.
Critics argue that while innovative, the system must prove scalable. Larger rovers might require amplified versions, increasing complexity. However, proponents counter that modularity—deploying fleets of small, wheel-equipped bots—mitigates this, allowing cost-effective exploration of multiple sites.
Looking ahead, this technology could catalyze South Korea’s role in the lunar economy. With private firms like Innospace pursuing commercial launches, as noted in a December 2025 Anadolu Ajansı report, the nation is poised to export space tech, fostering global partnerships.
Evolving Visions for Moon Habitation
The moon’s caves represent untapped potential for colonization, offering natural protection from radiation and meteorites. Exploring them safely demands robots like KAIST’s, which can map interiors without risking human lives. Insights from Danuri’s gamma ray spectrometer, studying surface composition, could identify prime cave locations for resource extraction.
X sentiment reflects optimism, with posts envisioning “islands of stability” for lunar mining, tying into non-Gaussian diagnostics for extreme environments. This buzz underscores the prototype’s timeliness amid a surge in robotic missions.
Ultimately, South Korea’s rover embodies a shift toward agile, adaptive exploration tools. By mastering the moon’s hidden realms, it paves the way for sustainable human presence, blending engineering ingenuity with strategic foresight. As more nations join the lunar fray, innovations like these morphing wheels will likely define the next era of space discovery.

