
Intel has won a contract to provide the Defense Advanced Research Projects Agency (DARPA) with simulation software for autonomous off-road vehicle testing.
Automakers around the world are working to develop autonomous vehicles, but their application goes far beyond the highway. Unfortunately, most autonomous vehicle development focuses almost exclusively on highway travel, leaving a gaping hole in the technology’s future, as Intel highlights:
In the context of autonomous driving, the gap between on-road and off-road deployment is still very significant. Many simulation environments exist today, but few are optimized for off-road autonomy development at scale and speed. Additionally, real-world demonstrations continue to serve as the primary method to verify system performance.
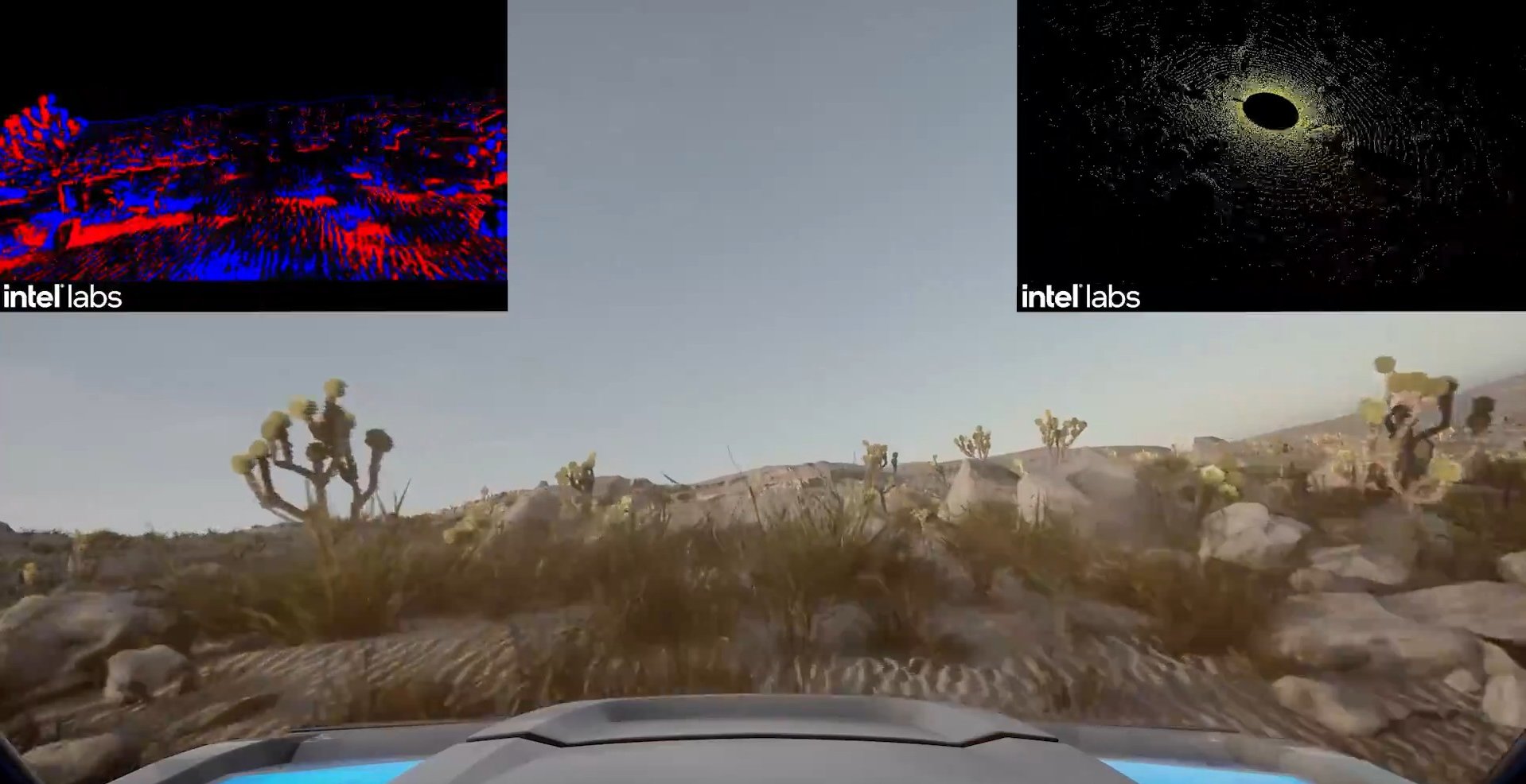
Off-road autonomous vehicles must deal with substantial challenges, including a lack of road networks and extreme terrain with rocks and all types of vegetation, among many others. Such extreme conditions make developing and testing expensive and slow. The RACER-Sim program aims to solve this problem by providing advanced simulation technologies to develop and test solutions, reducing deployment time and validation of AI-powered autonomous systems.
To solve these problems, DARPA is turning to Intel to provide simulation software to help further off-road development.
“Intel Labs has already made progress in advancing autonomous vehicle simulation through several projects, including the CARLA simulator, and we’re proud to participate in RACER-Sim to continue contributing to the next frontier of off-road robotics and autonomous vehicles,” said German Ros, Autonomous Agents Lab director at Intel Labs. “We brought together a team of renowned experts from the Computer Vision Center and UT Austin with the goal of creating a versatile and open platform to accelerate progress in off-road ground robots for all types of environments and conditions.”

